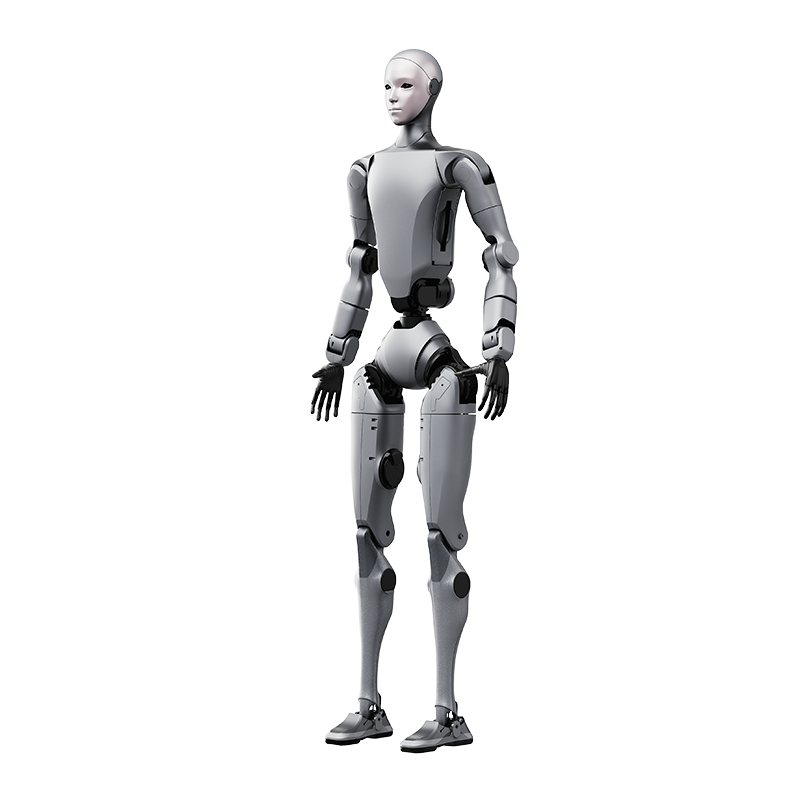
Unser Einsteiger-Humanoidroboter G1 Base ist sofort einsatzbereit und kann per Fernbedienung gesteuert werden. Er bietet eingeschränkte Armbeweglichkeit, unterstützt keine Weiterentwicklung und verfügt nicht über fortschrittliche Rechenmodule wie den NVIDIA Jetson Orin. Ideal für einfache Demonstrationen, Aufgaben oder kostengünstige Projekte, die keine fortgeschrittene Interaktivität oder Anpassung erfordern.
Vorprogrammierte humanoide Bewegungen
Der G1 Base ist ein voll zweibeiniger humanoider Roboter mit vorinstallierten Geh-, Tanz- und Selbstaufrichtungsfunktionen – Programmierung ist nicht erforderlich. Einfach einschalten und schon führt er realistische Bewegungen aus.

Wendig, leicht und stoßfest
Der robuste humanoide Roboter G1 Base hält das Gleichgewicht, fängt sich nach Stürzen wieder und lässt sich für den einfachen Transport zusammenklappen. Sein kompakter Rahmen und der große Gelenkbereich ermöglichen agile Bewegungen in realen Umgebungen.

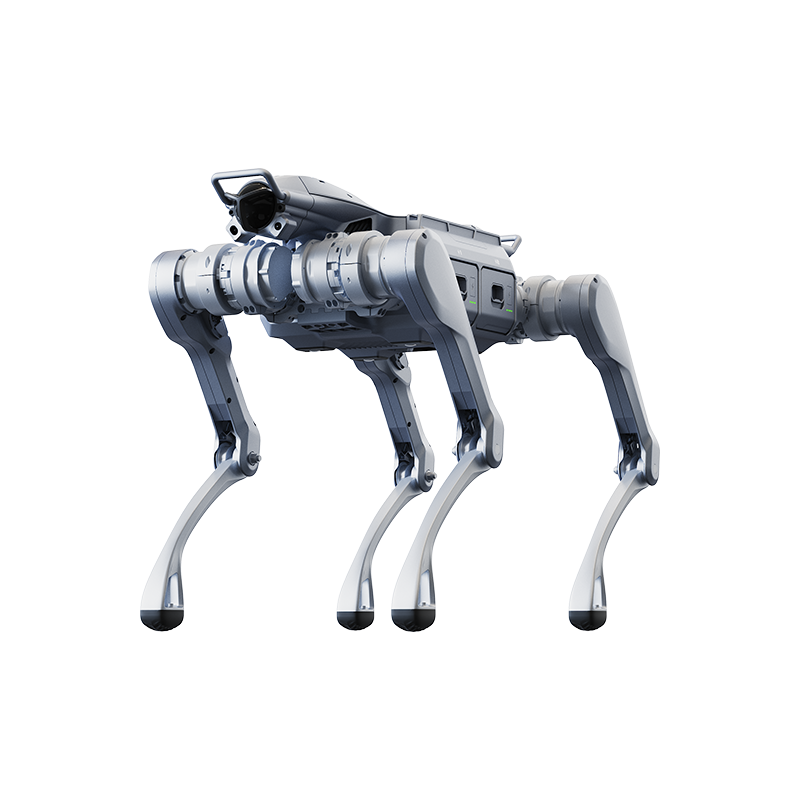
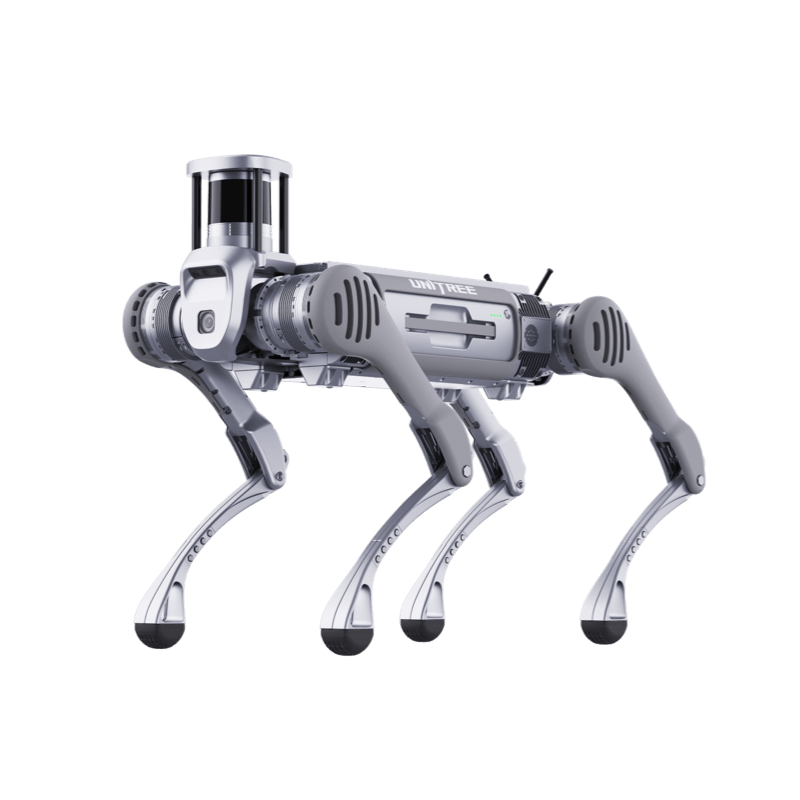
Autonome Navigation mit 360°-Wahrnehmung
Mithilfe von integriertem LiDAR und einer Tiefensensorkamera navigiert die G1 Base autonom durch einfaches Gelände mit Hinderniserkennung und räumlicher Erfassung – ideal für Demonstrationen, Forschung oder Tests im Innen- und Außenbereich.

Hauptprozessor:
Hochleistungsprozessor mit 8 Kernen
Hochleistungsmodul:
Nicht unterstützt
Unterstützung der Sekundarentwicklung:
Nicht unterstützt
Chassis & Rahmen
Handtyp: Dummyhände ohne Handgelenke
Abmessungen (L x B x H, stehend): 1320 x 450 x 200 mm
Abmessungen (gehockt): 690 x 450 x 300 mm
Gewicht (mit Akku): 35 kg
Werkstoffe: Aluminiumlegierung und hochfester technischer Kunststoff
Batterie
Akkukapazität: 9000 mAh (Schnellverschluss)
Akkulaufzeit: ca. 2 Stunden
Ladeadapter: 54 V / 5 A

Höchstgeschwindigkeit:
2 m/s
Maximales Drehmoment der Verbindung:
Knie: 90 N·m
Maximale Belastung des Arms:
ca. 2 kg
Freiheitsgrade (DOF):
Gesamt-Freiheitsgrade: 23
Einhand-Feindlichkeitsgrade: 0
Kopf-DOF: 0
Handgelenk-DOF: 0
Arm-DOF: 5
Beinfreiheitsgrad: 6
Taillen-DOF: 1
Gelenk-Ausgangslager:
Industrielle Kreuzrollenlager; hohe Präzision, hohe Belastbarkeit
Gelenkmotor:
Permanentmagnet-Synchronmotor mit Innenläufer, hoher Drehzahl und geringer Massenträgheit; besseres Ansprechverhalten und verbesserte Wärmeableitung
Waden- und Oberschenkellänge: 0,6 m
Armspannweite: 0,05 m
Gelenkbewegungsbereiche:
Taille: Z ±155°
Knie: 0–165°
Hüfte: P ±154°, R −30–170°, Y ±158°
3D-LiDAR: LIVOX MID-360
Tiefenkamera: Intel RealSense D435i
Tastsensoren an den Händen: Nein
Wi-Fi: Wi-Fi 6
Bluetooth: Bluetooth 5.2
Fernbedienungsoption: Ja
Mikrofonarray: 4-Mikrofon-Array mit Rausch- und Echounterdrückung
Eingebauter Lautsprecher: 5-Watt-Stereo-Lautsprecher
Sprachfunktion: Ja
OTA-Upgrade-System: Ja
Manuelle Steuerung: Ja
Hohlgelenkverdrahtung: Ja
Gemeinsamer Encoder: Dual-Encoder
Kühlsystem: Lokale Luftkühlung
Garantiezeitraum: 8 Monate
Dex3 Hände: Nein
Dex3-Hände mit taktilen Sensoren: Nein
Inspiriert 5-Finger-Hände: Nein
Dex5 Hände: Nein